1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
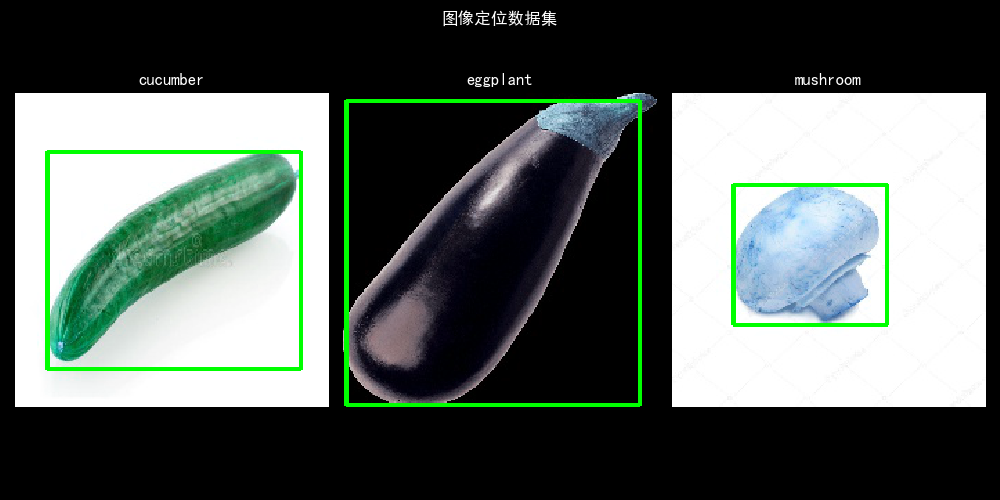
| class LocationDataSet(Dataset):
def __init__(self, root_dir, train=True, transform=None, input_dim=1):
"""
自定义数据集类,加载定位数据集
1. 训练部分,加载编码前50图像和标记数据
2. 测试部分,加载编码50之后图像和标记数据
:param root_dir:
:param train:
:param transform:
"""
cates = ['cucumber', 'eggplant', 'mushroom']
class_binary_label = [[1, 0, 0], [0, 1, 0], [0, 0, 1]]
self.train = train
self.transform = transform
self.imgs = []
self.bboxes = []
self.classes = []
for cate_idx in range(3):
if self.train:
for i in range(1, 51):
img, bndbox, class_name = self._get_item(root_dir, cates[cate_idx], i)
bndbox = bndbox / input_dim
self.imgs.append(img)
self.bboxes.append(np.hstack((bndbox, class_binary_label[cate_idx])))
self.classes.append(class_name)
else:
for i in range(51, 61):
img, bndbox, class_name = self._get_item(root_dir, cates[cate_idx], i)
bndbox = bndbox / input_dim
self.imgs.append(img)
self.bboxes.append(np.hstack((bndbox, class_binary_label[cate_idx])))
self.classes.append(class_name)
def __getitem__(self, idx):
img = self.imgs[idx]
if self.transform:
sample = self.transform(img)
else:
sample = img
return sample, torch.Tensor(self.bboxes[idx]).float()
def __len__(self):
return len(self.imgs)
def _get_item(self, root_dir, cate, i):
img_path = os.path.join(root_dir, '%s_%d.jpg' % (cate, i))
img = cv2.imread(img_path)
xml_path = os.path.join(root_dir, '%s_%d.xml' % (cate, i))
x = xmltodict.parse(open(xml_path, 'rb'))
bndbox = x['annotation']['object']['bndbox']
bndbox = np.array(
[float(bndbox['xmin']), float(bndbox['ymin']), float(bndbox['xmax']), float(bndbox['ymax'])])
return img, bndbox, x['annotation']['object']['name']
|
未找到相关的 Issues 进行评论
请联系 @zjykzj 初始化创建