OpenCV在模块opencv_contrib中实现了基于图的图像分割算法,其实现和作者提供的工程源码略有差别
下面首先解析源码,然后通过示例验证分割效果
官网参考文档:cv::ximgproc::segmentation::GraphSegmentation Class Reference 头文件segmentation.hpp - /path/to/include/opencv4/opencv2/ximgproc/segmentation.hpp 源文件graphsegmentation.cpp - /path/to/opencv_contrib/modules/ximgproc/src/graphsegmentation.cpp 实现示例graphsegmentation_demo.cpp - /path/to/opencv_contrib/modules/ximgproc/samples/graphsegmentation_demo.cpp OpenCV源码比较复杂,抽取相应实现到GraphLib/cplusplus/samples/graphsegmentation
命令空间 算法位于命令空间cv::ximgproc::segmentation中
1 2 3 namespace cv { namespace ximgproc { namespace segmentation {
并查集 OpenCV实现了并查集操作,定义了并查集元素类PointSetElement以及并查集操作类PointSet
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 class PointSetElement { public : int p; int size ; PointSetElement() { } PointSetElement(int p_) { p = p_; size = 1 ; } }; class PointSet { public : PointSet(int nb_elements_); ~PointSet(); int nb_elements; int getBasePoint (int p) void joinPoints (int p_a, int p_b) int size (unsigned int p) return mapping[p].size ; } private : PointSetElement* mapping; };
对于PointSetElement而言,定义了分量大小\(size\) 以及当前像素点在最小生成树中的父指针\(p\)
对于PointSet而言,有两个成员和3个函数
nb_elements:分量个数mapping:点集元素指针getBasePoint(int p):得到元素所属分量的根节点坐标joinPoints(int p_a, int p_b):合并两个分量size(unsigned int p):返回元素p所在分量个数1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 PointSet::PointSet(int nb_elements_) { nb_elements = nb_elements_; mapping = new PointSetElement[nb_elements]; for ( int i = 0 ; i < nb_elements; i++) { mapping [i] = PointSetElement(i); } } PointSet::~PointSet() { delete [] mapping ; } int PointSet::getBasePoint( int p) { int base_p = p; while (base_p != mapping [base_p].p) { base_p = mapping [base_p].p; } // Save mapping for faster acces later mapping [p].p = base_p; return base_p; } void PointSet::joinPoints(int p_a, int p_b) { // Always target smaller set , to avoid redirection in getBasePoint if (mapping [p_a].size < mapping [p_b].size) swap(p_a, p_b); mapping [p_b].p = p_a; mapping [p_a].size += mapping [p_b].size; nb_elements }
在构造函数中,通过输入的参数nb_elements_创建指针空间,初始化每个点集元素的父指针指向自身 函数getBasePoint查询根节点,使用了路径压缩进行优化 函数joinPoints合并两个分量,累加两个分量个数到根节点。与工程实现不同的是,这里比较size大小进行合并 边 定义类Edge保存边信息
1 2 3 4 5 6 7 8 9 10 class Edge { public : int from ; int to; float weight; bool operator <(const Edge& e) const { return weight < e.weight; } };
包含两个顶点坐标以及边权重,同时重写比较函数,可作用于边集排序
图分割算法 OpenCV定义了一个图分割算法声明类GraphSegemntation以及一个图分割算法实现类GraphSegmentationImpl
声明 图分割算法声明类GraphSegmentation位于segmentation.hpp
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 class CV_EXPORTS_W GraphSegmentation : public Algorithm { public: CV_WRAP virtual void processImage(InputArray src , OutputArray dst ) = 0 ; CV_WRAP virtual void setSigma(double sigma ) = 0 ; CV_WRAP virtual double getSigma() = 0 ; CV_WRAP virtual void setK(float k ) = 0 ; CV_WRAP virtual float getK() = 0 ; CV_WRAP virtual void setMinSize(int min_size ) = 0 ; CV_WRAP virtual int getMinSize() = 0 ; }; CV_EXPORTS_W Ptr<GraphSegmentation> createGraphSegmentation(double sigma =0.5, float k =300, int min_size =100) ;
声明了对外提供的接口,同时提供了创建图分割类对象的辅助函数createGraphSegmentation
实现 图分割算法实现类GraphSegmentationImpl位于segmentation.hpp,其继承了接口类GraphSegmentation并实现了分割算法
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 class GraphSegmentationImpl :public GraphSegmentation { public : GraphSegmentationImpl() { sigma = 0.5 ; k = 300 ; min_size = 100 ; name_ = "GraphSegmentation" ; } ~GraphSegmentationImpl() CV_OVERRIDE { }; virtual void processImage (InputArray src, OutputArray dst) CV_OVERRIDE virtual void setSigma (double sigma_) CV_OVERRIDE if (sigma_ <= 0 ) { sigma_ = 0.001 ; } sigma = sigma_; } virtual double getSigma () CV_OVERRIDE return sigma; } virtual void setK (float k_) CV_OVERRIDE virtual float getK () CV_OVERRIDE return k; } virtual void setMinSize (int min_size_) CV_OVERRIDE virtual int getMinSize () CV_OVERRIDE return min_size; } virtual void write (FileStorage& fs) const CV_OVERRIDE fs << "name" << name_ << "sigma" << sigma << "k" << k << "min_size" << (int )min_size; } virtual void read (const FileNode& fn) CV_OVERRIDE CV_Assert( (String )fn["name" ] == name_ ); sigma = (double )fn["sigma" ]; k = (float )fn["k" ]; min_size = (int )(int )fn["min_size" ]; } private : double sigma; float k; int min_size; String name_; void filter (const Mat &img, Mat &img_filtered) void buildGraph (Edge **edges, int &nb_edges, const Mat &img_filtered) void segmentGraph (Edge * edges, const int &nb_edges, const Mat & img_filtered, PointSet **es) void filterSmallAreas (Edge *edges, const int &nb_edges, PointSet *es) void finalMapping (PointSet *es, Mat &output) };
public函数包括
private函数包括:
filter:高斯滤波buildgraph:创建边集segmentGraph:Kruskal算法得到最小生成树filterSmallAreas:合并小分量finalMapping:创建输出图另外createGraphSegmentation创建了分割类对象
createGraphSegmentation 创建类对象,赋值高斯滤波参数sigma,阈值函数参数k,最小分量大小min_size,最后返回对象指针
1 2 3 4 5 6 7 8 9 10 Ptr<GraphSegmentation> createGraphSegmentation(double sigma , float k , int min_size ) { Ptr<GraphSegmentation> graphseg = makePtr<GraphSegmentationImpl>() ; graphseg->setSigma(sigma ) ; graphseg->setK(k ) ; graphseg->setMinSize(min_size ) ; return graphseg; }
filter 首先将输入图像转换成浮点类型,再调用高斯滤波函数GaussianBlur进行处理
1 2 3 4 5 6 7 8 9 10 void GraphSegmentationImpl::filter(const Mat &img, Mat &img_filtered) { Mat img_converted; img.convertTo(img_converted , CV_32F) ; GaussianBlur(img_converted , img_filtered , Size(0, 0) , sigma, sigma); }
输入卷积核大小为\(Size(0,0)\) ,参考getGaussianKernel ,表示根据sigma值计算卷积核大小
buildgraph 从左到右,从上到下的遍历像素点,计算当前顶点和上/下/左/右 顶点的边
1 2 3 4 5 for (int delta = -1 ; delta <= 1 ; delta += 2 ) { for (int delta_j = 0 , delta_i = 1 ; delta_j <= 1 ; delta_j++ || delta_i--) { int i2 = i + delta * delta_i; int j2 = j + delta * delta_j;
i2/j2取值为
1 2 3 4 i2 = -1 j2 = 0 i2 = 0 j2 = -1 i2 = 1 j2 = 0 i2 = 0 j2 = 1
边权重通过计算相邻像素点之间的\(L2\) 距离获得
1 2 3 for ( int channel = 0 tmp_total += pow(p[j * nb_channels + channel] - p2[j2 * nb_channels + channel], 2 ); }
创建的边集会出现重复边的情况(对无向图而言,虽然通过属性from/to明确了初始点和终止点 ),不过在后续操作中都会使用到
segmentGraph 通过Kruskal算法实现分量的合并。首先进行边集排序,类Edge重写了比较函数,所以按权值升序排序
1 std ::sort (edges , edges + nb_edges);
然后创建并查集类PointSet
1 *es = new PointSet(img_filtered .cols * img_filtered .rows ) ;
并设置阈值函数,初始时每个分量个数为1,所以阈值大小为k
1 2 3 4 float * thresholds = new float [total_points];for (int i = 0 ; i < total_points; i++) thresholds[i] = k;
遍历所有边,判断两个顶点是否位于同一分量。如果不是,判断是否满足边界条件。如果不是,合并两分量,更新阈值并设置边权重为0
1 2 3 4 5 6 7 8 9 10 11 12 13 14 for ( int i = 0 ; i < nb_edges; i++) { int p_a = (*es) ->from ); int p_b = (*es) ->to ); if (p_a != p_b) { if (edges[i].weight <= thresholds[p_a] && edges[i].weight <= thresholds[p_b]) { (*es) -> p_a = (*es) -> thresholds[p_a] = edges[i].weight + k / (*es) -> edges[i].weight = 0 ; } } }
由于边集存在重复边的情况,所以将已使用的边权值设置为0之后,还有另一条相同的无向边存在
filterSmallAreas 再次遍历所有边,合并小分量
1 2 3 4 5 6 7 8 9 10 11 12 void GraphSegmentationImpl::filterSmallAreas(Edge * edges , const int &nb_edges , PointSet * es ) { for ( int i = 0 ; i < nb_edges; i++) { if (edges[i ] .weight > 0 ) { int p_a = es->getBasePoint(edges [i ].from ) ; int p_b = es->getBasePoint(edges [i ].to ) ; if (p_a != p_b && (es->size(p_a) < min_size || es->size(p_b) < min_size)) { es->joinPoints(p_a , p_b ) ; } } } }
finalMapping 本函数作用于最后的不同分量颜色设置,输入参数为合并操作后的点集PointSet *es以及单通道图像Mat &output。同一分量的像素点赋值同一个值,像素值从0开始递增
示例 实现代码如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 #include "opencv2/ximgproc/segmentation.hpp" #include "opencv2/highgui.hpp" #include "opencv2/core.hpp" #include "opencv2/imgproc.hpp" #include <iostream> using namespace cv;using namespace cv::ximgproc::segmentation;Scalar hsv_to_rgb (Scalar) ;Scalar color_mapping (int ) ;static void help () std ::cout << std ::endl << "A program demonstrating the use and capabilities of a particular graph based image" << std ::endl << "segmentation algorithm described in P. Felzenszwalb, D. Huttenlocher," << std ::endl << " \"Efficient Graph-Based Image Segmentation\"" << std ::endl << "International Journal of Computer Vision, Vol. 59, No. 2, September 2004" << std ::endl << std ::endl << "Usage:" << std ::endl << "./graphsegmentation_demo input_image output_image [simga=0.5] [k=300] [min_size=100]" << std ::endl ; } Scalar hsv_to_rgb (Scalar c) { Mat in (1 , 1 , CV_32FC3) ; Mat out (1 , 1 , CV_32FC3) ; float *p = in.ptr<float >(0 ); p[0 ] = (float ) c[0 ] * 360.0f ; p[1 ] = (float ) c[1 ]; p[2 ] = (float ) c[2 ]; cvtColor(in, out, COLOR_HSV2RGB); Scalar t; Vec3f p2 = out.at<Vec3f>(0 , 0 ); t[0 ] = (int ) (p2[0 ] * 255 ); t[1 ] = (int ) (p2[1 ] * 255 ); t[2 ] = (int ) (p2[2 ] * 255 ); return t; } Scalar color_mapping (int segment_id) { double base = (double ) (segment_id) * 0.618033988749895 + 0.24443434 ; return hsv_to_rgb(Scalar(fmod (base, 1.2 ), 0.95 , 0.80 )); } int main (int argc, char **argv) if (argc < 2 || argc > 6 ) { help(); return -1 ; } Ptr<GraphSegmentation> gs = createGraphSegmentation(); if (argc > 3 ) gs->setSigma(atof(argv[3 ])); if (argc > 4 ) gs->setK((float ) atoi(argv[4 ])); if (argc > 5 ) gs->setMinSize(atoi(argv[5 ])); if (!gs) { std ::cerr << "Failed to create GraphSegmentation Algorithm." << std ::endl ; return -2 ; } Mat input, output, output_image; input = imread(argv[1 ]); if (!input.data) { std ::cerr << "Failed to load input image" << std ::endl ; return -3 ; } gs->processImage(input, output); double min , max ; minMaxLoc(output, &min , &max ); int nb_segs = (int ) max + 1 ; std ::cout << nb_segs << " segments" << std ::endl ; output_image = Mat::zeros(output.rows, output.cols, CV_8UC3); uint *p; uchar *p2; for (int i = 0 ; i < output.rows; i++) { p = output.ptr<uint>(i); p2 = output_image.ptr<uchar>(i); for (int j = 0 ; j < output.cols; j++) { Scalar color = color_mapping(p[j]); p2[j * 3 ] = (uchar) color[0 ]; p2[j * 3 + 1 ] = (uchar) color[1 ]; p2[j * 3 + 2 ] = (uchar) color[2 ]; } } imwrite(argv[2 ], output_image); std ::cout << "Image written to " << argv[2 ] << std ::endl ; return 0 ; }
首先解析命令行参数,创建图像分割类对象并初始化参数
然后图像分割函数进行基于图的图像分割,输出单通道灰度图像
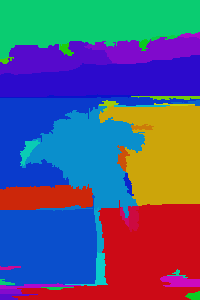
最后将创建3通道图像并赋值,同一分量的像素点设置相同的值。与论文提供的实现不同,为了使得分量间的颜色更加有区别,进行HSV颜色空间和RGB颜色空间的转换
sigma=0.5, k=500, min_size=50
sigma=0.5, k=300, min_size=100