1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
| #include "opencv2/imgproc.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include <iostream>
using namespace cv;
using namespace std;
Mat image, src, src_gray, grad;
int ksize = 3;
double scale = 1;
double delta = 0;
int ddepth = CV_16S;
int lowThreshold = 40;
int highThreshold = 120;
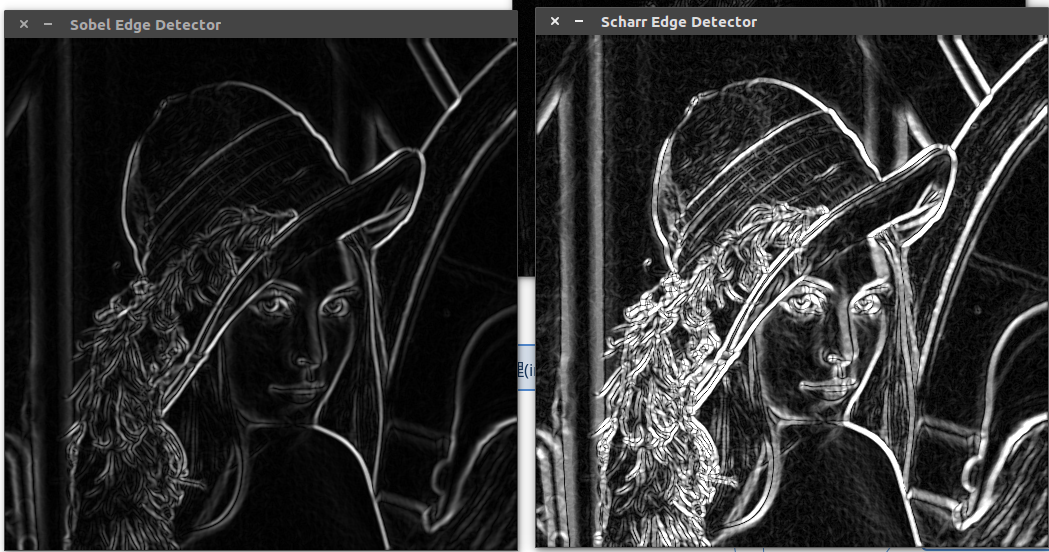
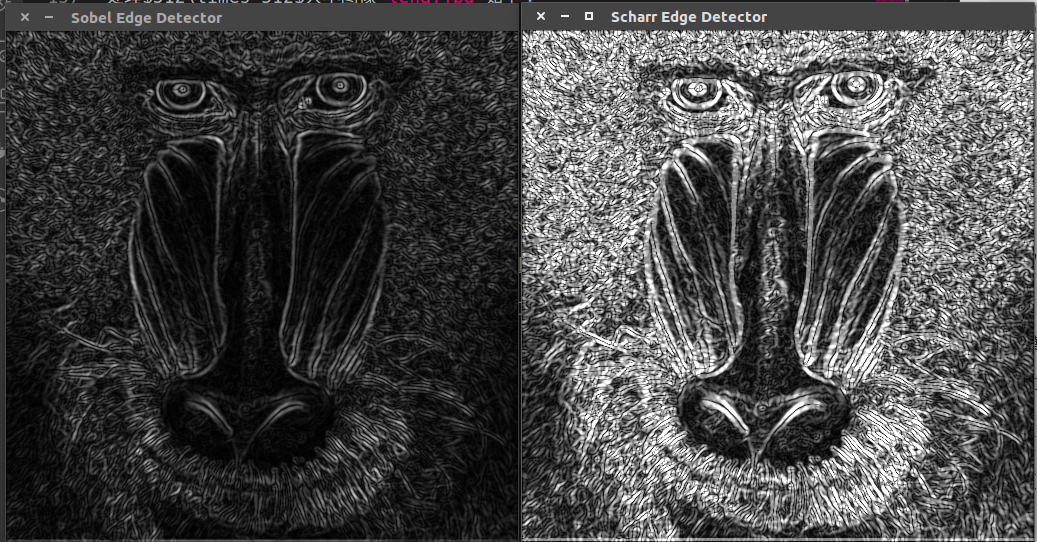
void onSobel(int, void *) {
Mat grad_x, grad_y;
Mat abs_grad_x, abs_grad_y;
Sobel(src_gray, grad_x, ddepth, 1, 0, ksize, scale, delta, BORDER_DEFAULT);
Sobel(src_gray, grad_y, ddepth, 0, 1, ksize, scale, delta, BORDER_DEFAULT);
convertScaleAbs(grad_x, abs_grad_x);
convertScaleAbs(grad_y, abs_grad_y);
addWeighted(abs_grad_x, 0.5, abs_grad_y, 0.5, 0, grad);
const string winname = "Sobel Edge Detector";
imshow(winname, grad);
}
void onScharr(int, void *) {
Mat grad_x, grad_y;
Mat abs_grad_x, abs_grad_y;
Scharr(src_gray, grad_x, ddepth, 1, 0, scale, delta, BORDER_DEFAULT);
Scharr(src_gray, grad_y, ddepth, 0, 1, scale, delta, BORDER_DEFAULT);
convertScaleAbs(grad_x, abs_grad_x);
convertScaleAbs(grad_y, abs_grad_y);
addWeighted(abs_grad_x, 0.5, abs_grad_y, 0.5, 0, grad);
const string winname = "Scharr Edge Detector";
imshow(winname, grad);
}
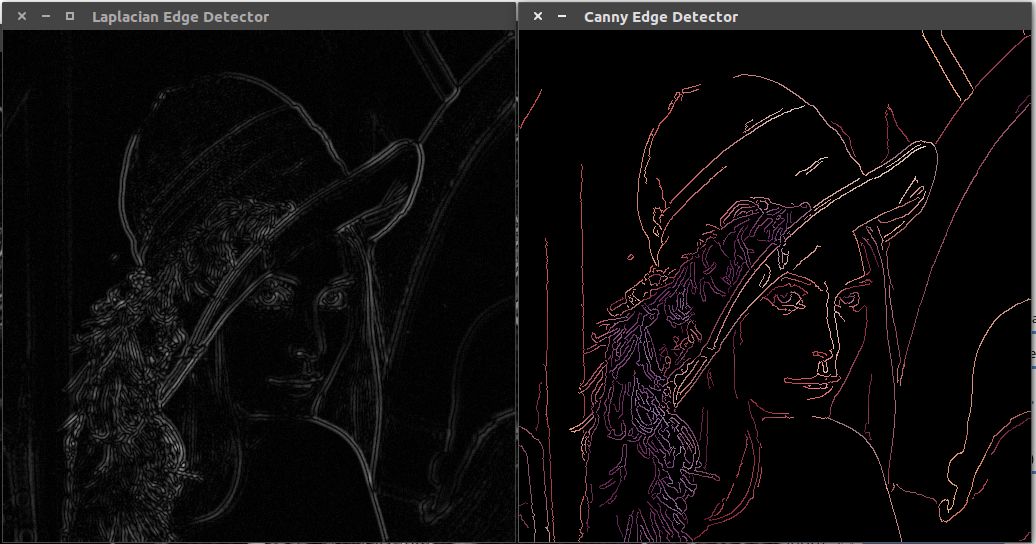
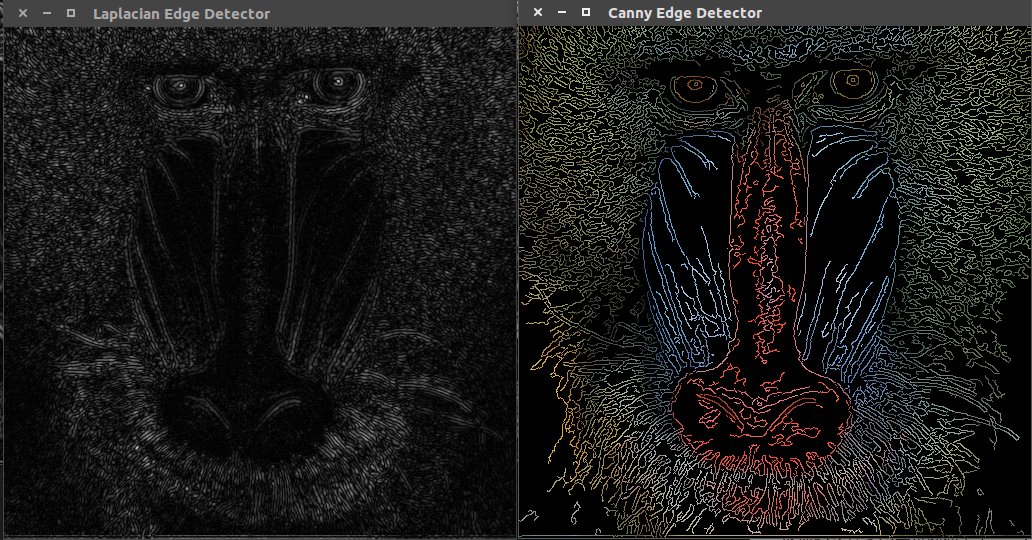
void onLaplacian(int, void *) {
Mat grad, abs_grad;
Laplacian(src_gray, grad, ddepth, ksize, scale, delta, BORDER_DEFAULT);
convertScaleAbs(grad, abs_grad);
const string winname = "Laplacian Edge Detector";
imshow(winname, abs_grad);
}
void onCanny(int, void *) {
Mat dst, detected_edges;
Canny(src, detected_edges, lowThreshold, highThreshold, ksize);
dst = Scalar::all(0);
src.copyTo(dst, detected_edges);
const string winname = "Canny Edge Detector";
imshow(winname, dst);
}
int main(int argc, char **argv) {
string imageName = "../lena.jpg";
image = imread(imageName, IMREAD_COLOR);
if (image.empty()) {
printf("Error opening image: %s\n", imageName.c_str());
return 1;
}
GaussianBlur(image, src, Size(5, 5), 1.4, 1.4, BORDER_DEFAULT);
cvtColor(src, src_gray, COLOR_BGR2GRAY);
double t0 = cv::getTickCount();
onSobel(0, nullptr);
double t1 = cv::getTickCount();
onScharr(0, nullptr);
double t2 = cv::getTickCount();
onLaplacian(0, nullptr);
double t3 = cv::getTickCount();
onCanny(0, nullptr);
double t4 = cv::getTickCount();
double tickFrequency = cv::getTickFrequency();
cout << "sobel: " << (t1 - t0) / tickFrequency << endl;
cout << "scharr: " << (t2 - t1) / tickFrequency << endl;
cout << "laplacian: " << (t3 - t2) / tickFrequency << endl;
cout << "canny: " << (t4 - t3) / tickFrequency << endl;
waitKey(0);
return 0;
}
|