学习路径如下:
- 图的基本定义
- 顶点/边/图的关系
- 图的存储结构(本文学习内容)
- 深度/广度优先遍历
- 最小生成树
完整工程:zjZSTU/GraphLib
概述
有5种图的存储结构:
- 邻接矩阵
- 邻接表
- 十字链表
- 邻接多重表
- 边集数组
其中常用的存储结构是邻接矩阵和邻接表
邻接矩阵
图由两部分组成:顶点集+边集,分别存储这两部分有利于后续的操作
图的邻接矩阵(adjacency matrix)存储方式是用两个数组来表示图。一个一维数组存储图中顶点信息,一个二维数组(称为邻接矩阵)存储图中的边或弧信息
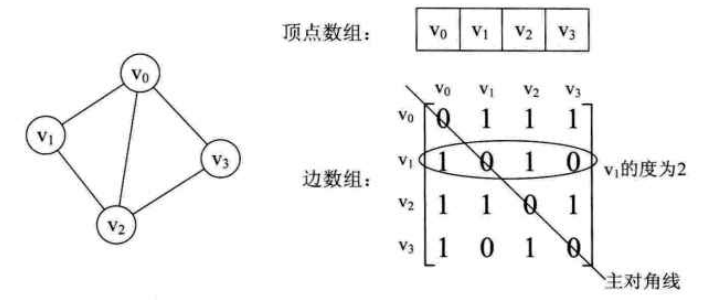
设图中有两个顶点,则邻接矩阵是一个的方阵,定义为:
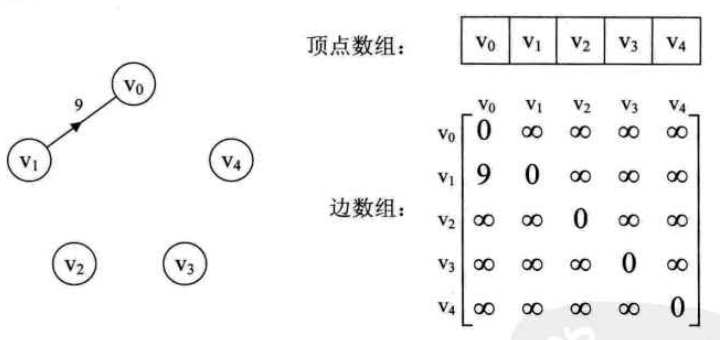
对于有权图,修改邻接矩阵指定位置的值即可,如下所示:
使用表示两顶点之间没有连接
C++实现
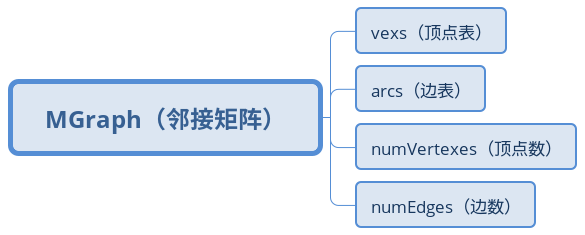
定义邻接矩阵
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
| #include <iostream>
#include <array>
#define MAXVEX 100
#define MAXEDGE 100
#define GINFINITY 63335
typedef std::string VertexType;
typedef int EdgeType;
typedef struct {
std::array<VertexType, MAXVEX> vexs;
std::array<std::array<EdgeType, MAXVEX>, MAXVEX> arcs;
int numVertexes, numEdges;
} MGraph;
|
创建邻接矩阵
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
| void Undigraph::CreateMGraph(MGraph *G) {
int i, j, k, w;
cout << "输入顶点数: ";
cin >> G->numVertexes;
cout << "输入边集数: ";
cin >> G->numEdges;
cout << "输入顶点信息:" << endl;
for (i = 0; i < G->numVertexes; i++) {
cin >> G->vexs[i];
}
for (i = 0; i < G->numVertexes; i++) {
for (j = 0; j < G->numVertexes; j++) {
if (i == j)
G->arcs[i][j] = 0;
else
G->arcs[i][j] = GINFINITY;
}
}
cout << "输入边信息" << endl;
for (k = 0; k < G->numEdges; k++) {
cout << "输入第" << k << "条边的上标、下标和权值: ";
cin >> i >> j >> w;
G->arcs[i][j] = w;
G->arcs[j][i] = w;
}
}
|
邻接表
邻接表(adjacency list)同样实现了顶点集和边集的分离,如下所示:
- 顶点集用一个一维数组存储(也可使用单链表存储),每个数据元素对象包含指向第一个邻接点的指针
- 每个顶点使用单链表存储邻接点信息,同时包含指向下一个邻接点的指针
c++实现
顶点对象有两个域:data和firstedge。data存储顶点信息,firstedge指向第一个临界点
边对象有两个域:adjvex和next。adjvex存储该邻接点在顶点表中的下标,next指向下一个邻接点
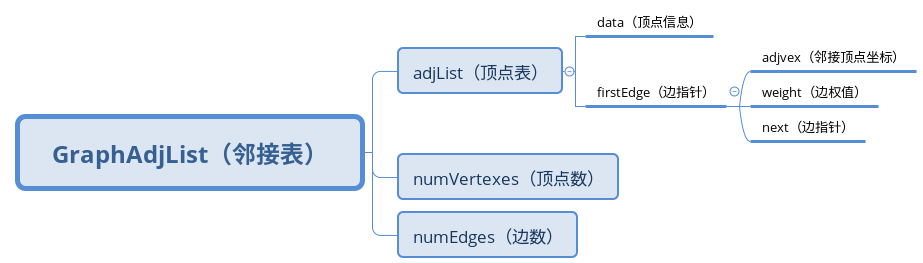
定义邻接表:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
|
typedef struct EdgeNode {
int adjvex;
EdgeType weight;
struct EdgeNode *next;
} EdgeNode;
typedef struct VertexNode {
VertexType data;
EdgeNode *firstEdge;
} VertextNode;
typedef struct {
std::array<VertextNode, MAXVEX> adjList;
int numVertexes, numEdges;
} GraphAdjList;
|
创建邻接表:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
| void Undigraph::CreateGraphAdjList(GraphAdjList *G) {
int i, j, k, w;
EdgeNode *e;
cout << "输入顶点数: ";
cin >> G->numVertexes;
cout << "输入边集数: ";
cin >> G->numEdges;
cout << "输入顶点信息:" << endl;
for (i = 0; i < G->numVertexes; i++) {
cin >> G->adjList[i].data;
G->adjList[i].firstEdge = nullptr;
}
cout << "输入边信息" << endl;
for (k = 0; k < G->numEdges; k++) {
cout << "输入第" << k << "条边的上标、下标和权值: ";
cin >> i >> j >> w;
e = (EdgeNode *) malloc(sizeof(EdgeNode));
e->adjvex = j;
e->weight = w;
e->next = G->adjList[i].firstEdge;
G->adjList[i].firstEdge = e;
e = (EdgeNode *) malloc(sizeof(EdgeNode));
e->adjvex = i;
e->weight = w;
e->next = G->adjList[j].firstEdge;
G->adjList[j].firstEdge = e;
}
}
|
小结
假定图有个顶点和条边,那么
- 创建邻接矩阵的时间复杂度为,创建邻接表的时间复杂度为
- 邻接矩阵的使用极大的浪费存储空间,但有利于数据查询、修改、增添和删除操作
- 邻接表的使用有利于避免浪费存储空间,但是提高了数据查询、修改、增添和删除操作的复杂度
相关阅读
未找到相关的 Issues 进行评论
请联系 @zjykzj 初始化创建